IEEE IV2024

6th Autoware Workshop at IEEE IV 2024, Jeju Island, Korea
on Sunday, June 2nd, 2024.
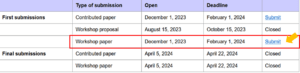
Important Dates
- Submission Deadline: February 1, 2024
- Acceptance Notification: March 30, 2024
- Camera Ready: April 22, 2024
Contact Info
- Website address: https://autoware.org/iv2024
Introduction
Autoware is the world’s first and largest open-source project and community around software and hardware for self-driving. Autoware is based on ROS (Robot Operating System) middleware, with all the necessary features required for fully autonomous driving: sensing, localization, perception, planning, and control; it supports multiple vehicle interfaces as well as map formats.
The Autoware Foundation (AWF) has over 70 members from academia, industry, and government, contributing to the shared resources to cover the full spectrum of software and hardware for the autonomous driving ecosystem. Autoware has found widespread adoption: it is used by hundreds of companies, runs on 30+ vehicle types, and is used in 20+ countries. Autoware increasing development includes Automated Valet Parking (AVP) in 2020, Cargo Delivery in 2021, RoboBus and Racing vehicles for 2022. Newer projects include the Open AD Kit (demonstrated at IROS 2023) and the MIH Open EV platform.
The goal of this workshop is to extend the Autoware community to the IEEE ITS Society and IV participants. The workshop will offer material for both newcomers to self-driving cars and experienced professionals. Newcomers will learn about Autoware what it is capable of and see real-world examples of how they can apply Autoware to further their own research or self-driving application development goals. Experienced professionals will learn directly from contributors about the latest activities in a vibrant and open-source community and find new opportunities to contribute their own expertise to furthering the development of autonomous driving technology for all.
Very recently, the Autoware Foundation established a local consortium in Taiwan. In addition, a new Autoware consortium in Korea has been proposed and already includes over 20 local members. Therefore the Asian region will see an increase in research and business opportunities around self-driving vehicles and Autoware. IEEE IV2024 brings a critical opportunity for all Autoware users to present their developments in the field of self-driving vehicles and to interact with the large global Autoware community. The Autoware Workshop will serve as a venue for the exchange of ideas and experiences.
The objectives of this 6th edition include investigating the state-of-the-art in self-driving technologies such as sensors, mapless navigation, connected vehicles, and semantic traffic-scene understanding, and their potential adoption into Autoware; investigate navigation approaches for autonomous racing vehicles and how to adapt the racing domain to the conventional urban driving domain; investigate the applications of cooperative-competitive multi-agent systems into autonomous driving; identify open challenges in autonomous driving such as adverse weather conditions and existing approaches.
Topics/Keywords:
The areas of interest of this Autoware workshop include – but are not limited to – the following:
- Open-source robotics, ROS, and Autoware-related projects
- Self-driving racing and self-driving in unstructured environments and adverse weather conditions
- New robotic platforms and sensors for robots and self-driving vehicles
- New algorithms for autonomous driving implemented in Autoware
- Applications of visual language models and semantic scene understanding for vehicles
- Simulation, open-source simulation tools
- Localization and Mapping: LiDAR-based, camera-based, and others
- Map-less navigation and planning
- Tools and formats to support operational design domains (ODDs) for Autoware
- Software-defined vehicles (SDV) and hardware support and drivers, including sensors and ECUs, for Autoware
- Case studies and field operational tests from real-world applications using Autoware
- Business opportunities using open-source software and the state of the arts
- Connected vehicles and open hardware vehicle platforms
- Safety and validation in self-driving software
- Safety in AI applications for self-driving
- Applications of Autoware in robotics and self-driving vehicles education
- Applications of Autoware for delivery, logistics, transportation, indoor/outdoor robotics
Call for Papers and Presentations
- We encourage students, researchers, and the community in general to submit their papers and contribute to the 6th Autoware Workshop at IV2024. The workshop will also feature prominent speakers and contributions from the growing open-source autonomous driving. Workshop participants, no matter their respective backgrounds and expertise, will find an interesting and engaging environment for discussion of practical aspects of self-driving using Autoware as a framework, as well as to discuss related state-of-the-art methods.
- The number of high-quality papers contributed to the Autoware workshop has been increasing. Self-driving racing teams that participated at the recent Japan Society of Automotive Engineers (JSAE) “AI Challenge” as well as F1TENTH racing activities at ICRA2023 (London), IV2023 (Anchorage), IROS2023 (Detroit) and ICCAS2023 (Yeosu) are invited to contribute several papers.
Submission Guidelines
Papers for the Autoware Workshop at IEEE IV2024 will follow the same dates, format and requirements of IEEE IV2024 papers, namely: full-length papers up to 6 pages in the final submission, but the first submission can be up to 10 pages for technical content including figures and references; the paper template is the IEEE Manuscript Templates for Conference Proceedings; and the submission will also use the IEEE Intelligent Transportation Systems Society Conference Management System at PaperCept. Autoware Workshop papers will be included in the IV204 conference proceedings, indexed at IEEE Xplore.
For Autoware Workshop papers submission at PaperCept, please select “Submit a contribution to IEEE IV 2024”, and then click “Submit” under “Workshop paper”.
For Autoware Workshop presentations, please submit the abstract of your intended talk (1 or 2 pages) directly to the workshop secretariat email address indicated above.

List of speakers (tentative):
- Besides the presentations by the selected papers accepted for the 6th Autoware Workshop at IV2024, the following is the list of potential speakers:
- Rahul Mangharam, University of Pennsylvania
- Dong Young Jang, Seoul National University of Science and Technology
- Cheolhyeon Kwon, Ulsan National Institute of Science & Technology
- Kyong Hoon Kim, Kyongpook National University
- Jaehyo Kim, Handong Global University
- Jin Hyun Kim, Gyeongsang National University
- Dong Sung Pae, Sangmyung University
- Sunho Jang, Korea Institute of Robotics & Technology Convergence
- Weisong Shi, University of Delaware
- Venkat Krovi, Clemson University
- Rahul Razdan, Florida Polytechnical University
- Doğan Ulus, Boğaziçi University
- Krzysztof Walas, Poznan University of Technology
- Chi-Sheng Shih, National Taiwan University
- Alexander Carballo, Nagoya University
- Zdeněk Hanzálek, Czech Technical University
- Yash Pant, University of Waterloo
- Johannes Betz, Technical University of Munich
Schedule (tentative)
OPENING
- 8:30 – 8:40 (GMT+9) Welcome address, the Board of Directors, AWF
- 8:40 – 9:00 (GMT+9) Update from the Autoware Foundation, SPC Vice Chair, AWF
- 9:00 – 9:20 (GMT+9) Autoware achievements & future plans” by Ryohsuke Mitsudome, TSC Chair, AWF
COFFEE BREAK
- 9:20 – 9:30 (GMT+9)
INVITED TALKS
- 9:30 – 10:50 (GMT+9) Several invited talks, about 20 mins per presentation
IV2024 PAPERS
- 10:50 – 12:00 (GMT+9) Accepted IV2024 workshop paper presentations, about 15 mins per presentation
LUNCH BREAK
- 12:00 – 13:00 (GMT+9)
TUTORIALS
- 13:00 – 14:00 (GMT+9) Tutorials of applications of Autoware, about 20 minutes per presentation
AWF COMMUNITY MEMBERS
- 14:00 – 15:00 (GMT+9) Several talks by Autoware community, about 15 mins per presentation
COFFEE BREAK
- 15:00 – 15:20 (GMT+9)
AWF INDUSTRY MEMBERS
- 15:20 – 16:30 (GMT+9) Several talks by industry members, about 15 mins per presentation
PANEL DISCUSSION
- 16:30 – 17:00 (GMT+9) In deep discussion from selected speakers
CLOSING
- 17:00 – 17:10 (GMT+9) Autoware Workshop closing address, Representative Board of Directors, AWF
Organizers
- Alexander Carballo, Gifu University and Tier IV, Inc. (alex@gifu-u.ac.jp)
- Rahul Mangharam, University of Pennsylvania (rahulm@seas.upenn.edu)
- Chi-Sheng Shih, National Taiwan University (cshih@csie.ntu.edu.tw)
- Jin Hyun Kim, Gyeongsang National University (jin.kim@gnu.ac.kr)
- Shinpei Kato, The Autoware Foundation, The University of Tokyo, and Tier IV, Inc. (shinpei.kato@autoware.org)
See you in the beautiful Jeju Island!



