Sensor data is collected from LiDAR, radars, camera, GNSS, IMU, and other sensors mounted on the autonomous vehicle.
Autoware Overview
Autoware is the world’s leading open-source software project for autonomous driving.
Autoware is built on Robot Operating System (ROS) and enables commercial deployment of autonomous driving in a broad range of vehicles and applications.
Autoware Project
Supported by the Autoware Foundation, Autoware consists of all the functionality required for autonomous driving (i.e., perception, localization, planning, control) in a modular architecture with crisply defined interfaces and APIs.Supported by the Autoware Foundation, Autoware consists of all the functionality required for autonomous driving (i.e., perception, localization, planning, control) in a modular architecture with crisply defined interfaces and APIs.
The Autoware open-source software is designed for scalability across a broad range of autonomous applications and developed by applying best practices and standards to achieve high quality and safety in real-world deployments.
-
30
Type of Vehicles
-
20
Countries
-
500
Companies
The Autoware Stack
Roadmap
Autoware continuously evolves to offer more capability towards curb-to-curb L4 autonomous driving.
Integrating dense urban areas, highways and final service destinations to offer full self-driving experience
People Transportation with Bus and Shuttles
People moving functionality using buses and shuttles was developed and supported in Autoware v3.0
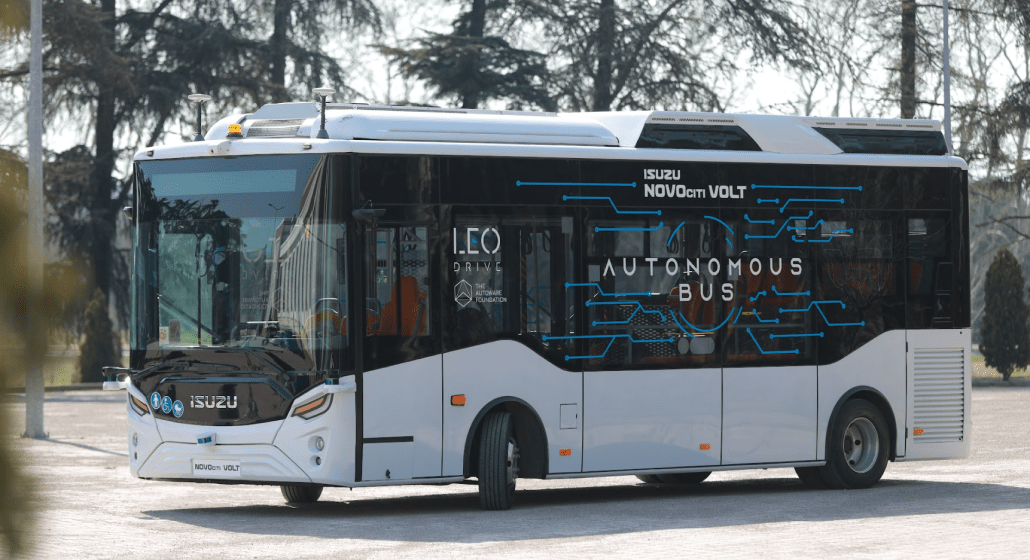
Fully autonomous bus operation in geofenced university campus area
Cargo Delivery and Autonomous Racing
Cargo Delivery functionality was developed and supported in Autoware v2.0 (also Autoware was used in autonomous racing competitions).
Fully autonomous factory/warehouse logistics operation. Autoware was also used in Indy Autonomous Challenge and F1Tenth

Autonomous Valet Parking (AVP)
Autonomous Valet Parking functionality was developed and supported in Autoware v1.0

Successfully delivered fully autonomous valet parking capability in a very controlled environment
Autoware.AI
Initial version of Autoware was released in 2015
Autoware was adopted in many private campus and public road robotaxi, shuttle and bus implementations
Core & Universe
Autoware continuously evolves to offer more capability towards curb-to-curb Level 4 autonomous driving.
Autoware Core includes all functionality required to support the ODDs targeted by the Autoware project. Autoware Core applies best-in-class software engineering practices, including pull request reviews, pull request builds, comprehensive documentation, 100% code coverage, a coding style guide, and a defined development and release process, all managed by an open-source community manager.
Autoware Universe enables additional packages to be built on top of Autoware Core that extend the functionality of Autoware. With Autoware Universe, functionality can be more easily integrated for advanced research and development, allowing for early experimentation and deployment of capabilities to be integrated into future versions of Autoware Core. Autoware Universe opens the door to participating in the application of Autoware to complex and challenging use cases such as Robo-Taxis operating in dense urban environments or high-speed autonomous racing.

Operational Design
Domains and Use Cases
Autonomous Valet Parking (AVP)
The Autoware V1.0 release addresses Autonomous Valet Parking and Autonomous Dept Maneuvering as example use cases. In this release, Autoware is capable of mapping of a parking lot, creation of the map for autonomous driving and autonomous driving on the parking lot.
Cargo Delivery
The Autoware V2.0 release supports Cargo Delivery, the transport of goods between multiple points or last mile delivery, which is an AD market segment that will grow significantly over the coming years.
Adoption and scaling of AD technology in the handling of goods is expected to precede mass adoption in passenger transportation solutions (e.g. Robo-Taxis) as the operational environment is much more constrained, and achieving safe operation requires significantly less simulation and real world validation.
The Autoware V2.0 release supports Cargo Delivery, the transport of goods between multiple points or last mile delivery, which is an AD market segment that will grow significantly over the coming years.
Racing
The Autoware Foundation is partnering with the F1TENTH Organization to bring Autoware to the F1TENTH racing community.
The F1TENTH platform is used by many universities as the basis of AD education and for advanced AD research. In addition, it offers students the opportunity to collaboratively compete against other university teams in F1TENTH racing competitions. Students build F1TENTH AVs and learn to develop the AD software which runs on the AV.
Robo-Bus/Shuttle
The Robo-Bus/Shuttle use case is the first public road ODD targeted for integration into Autoware Core. Fully autonomous driving (Level 4) will be supported for pre-defined routes and stops for autonomous buses and shuttles operating on public roads.
This release will include significant advancements to the Perception and Planning modules of Autoware, allowing for operation on public road environments, navigating amongst multiple vehicles, bicycles, and pedestrians, as well as recognizing traffic signals and complex traffic situations.
Robo-Taxi
The Robo-Taxi ODD consists of fully autonomous (Level 4) taxis operating in dense urban environments and is currently being made available as part of Autoware Universe.
This use case requires further enhancements to the Perception and Planning modules of Autoware as vehicles are operating autonomously throughout large service areas (e.g. entire city or downtown area) and in complex traffic situations.
Ultimately, the features and functionality to support the Robo-taxi use case will be integrated into Autoware Core, meeting the more stringent code quality and documentation requirements required for use in commercial applications.