Introducing Autonomous Vehicles for Electric Vehicles (AV4EV)

While much research has been performed in the areas of autonomous vehicle-related modules such as perception, localization, planning, control, and prediction, human-in-the-loop “end-to-end” approaches such as Deep Learning (DL) and Imitation Learning (IL) still have a ways to go when it comes to safety-critical operation.
The advantage of the “end-to-end” approach is that it considers the autonomous system as a whole and maps directly from the raw sensory input to the control outputs: the throttle, steering, and brakes. This approach is helpful in the racing field and can be extended to make meaningful real-road applications.
Imitation Learning (IL) has shown itself to be an effective end-to-end method that could be trained effectively using expert demonstrations such as existing models or human participation, but the safety aspects require much to be validated. One example, such as an open-source driving simulator, can support the development and validation of algorithms, but it lacks the connection to the real world and needs further testing on physical platforms.
Other examples, such as using reduced-scale vehicles for testing algorithms on one-twentieth and one-tenth scales, achieve promising results, but they have very limited computing power and sensing capability and are significantly different from full-scale vehicles. Finally, implementing learning algorithms on a real car generally requires a large financial commitment, cumbersome reverse engineering, and significant safety risks.
The Testing Solution: AV4EV Go-Kart Platform
Led by Professor Rahul Mangharam from the Department of Electrical and Systems Engineering at the University of Pennsylvania, a Graduate Student team at the UPenn CoE has developed a solution: an open design with a one-half-scale autonomous go-kart platform based on an existing chassis provided by the company Topkart USA, which can be used as a platform for development and testing of AV algorithms.

The AV4EV go-kart’s work focuses on supporting repeatable development, testing, and deployment workflows for the go-kart platform software, including the base system, middleware and packages, the application layers, and a simulation environment.
*This software-defined vehicle (SDV) approach is such that an application deployed on the go-kart can be used on another physical platform entirely (e.g., scooter, forklift, automobile) without building new applications from the ground up.
The go-kart’s software stack is based on ROS 2 and can run at high speeds. The stack includes LiDAR, a Camera, GNSS, and IMU sensors, and it implements localization, trajectory following, and obstacle avoidance functions. It’s also capable of carrying a human driver and is technically and financially friendly to universities and research institutions. This solution fills the gap between reduced-scale cars and full-scale vehicular platforms while extending the research scope from modular pipeline development in racing competitions to end-to-end sensing and control outputs.
AV4EV Go-Kart Systems Explained
The go-kart’s mechatronics system is designed as a modular system, consisting of several subsystems responsible for different tasks. There are seven major subsystems: Power Distribution (PD), Main Control (MC), User Interface (UI), Throttle-by-Wire (TBW), Brake-by-Wire (BBW), and Steer-by-Wire (SBW), Rear-Shelf Design (RSD) as indicated in the following images.
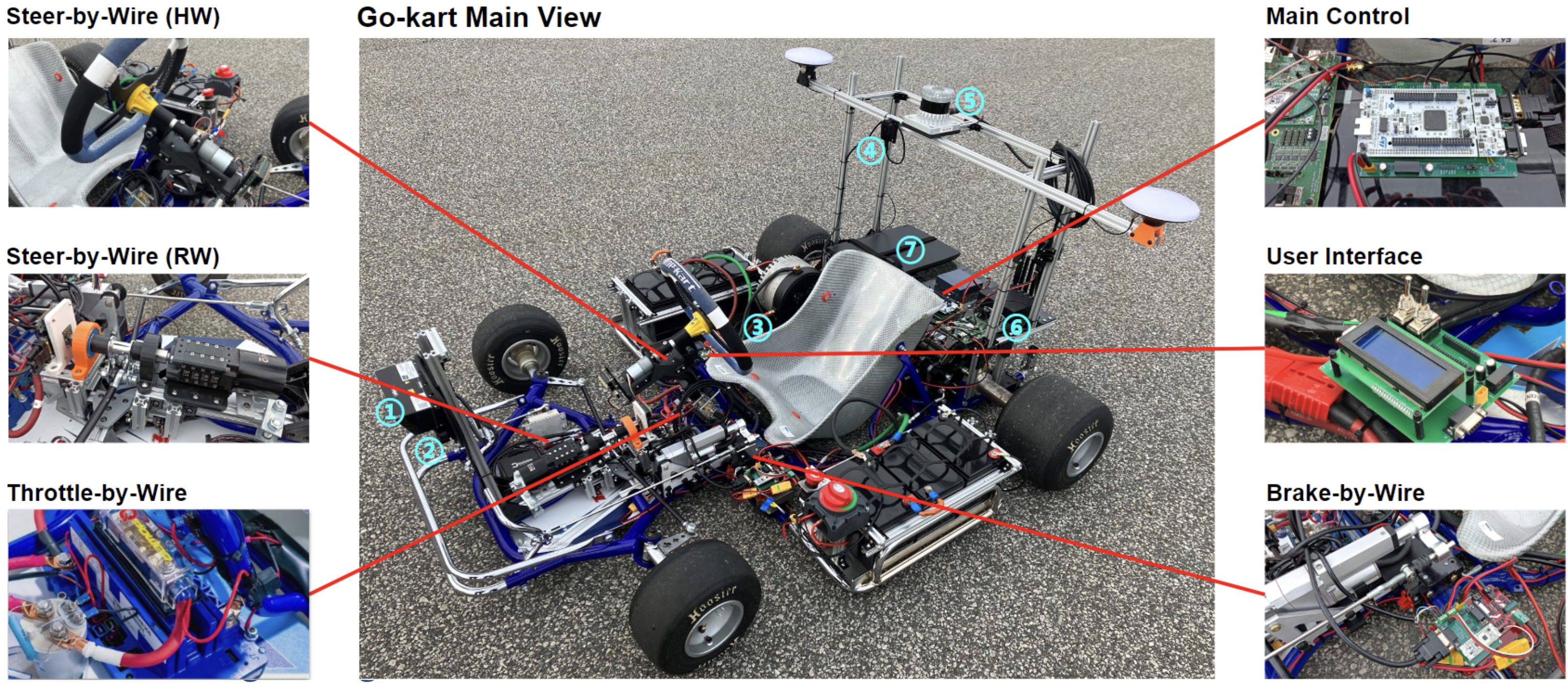
The “x-by-wire” system design approach, which centers around replacing conventional mechanical and hydraulic control systems with electronic signals, has been gaining popularity in the automotive industry. Eliminating traditional mechanical components could increase control stability, design flexibility, cost reduction, and efficiency. In our go-kart drive-by-wire design, all subsystems except the PD and the RSD use an STM32 Nucleo development board on a standalone PCB as the electronic control unit (ECU).
Like modern vehicle design, communication is achieved using the controller area network (CAN) to allow efficient information exchange between nodes. These modular control systems are integrated with the original go-kart chassis in a non-intrusive manner and are easy to understand, build, and modify.

In short, this go-kart is the first attempt in an effort to establish a standardized open design for modular electrical vehicle platforms. It provides a complete sensing solution and open-source software to perform autonomous vehicle-related perception, localization, planning, and control tasks, and it also provides an open-standard hardware solution to adapt a one-half-scale go-kart chassis to fill the gap between autonomous RC cars and full-size vehicles.
We see the future as very bright for AV4EV, and opportunities for academic research and development will continue to increase. As AV4EV knowledge and testing continue to make significant progress, it can be implemented in more closed vehicle systems such as hospitals, airports, campuses, and similar uses, helping reduce carbon emissions, improve vehicle safety, enhance mobility, and increase business efficiencies.
Connect with Prof. Rahul Mangharam at rahulm@seas.upenn.edu and UPenn’s Department of Electrical and Systems Engineering and benefit from a wide range of collaborations, knowledge sharing, and partnerships from various industries. As a research institute, we actively engage our network through meetings, conferences, and workshops designed by senior Faculty to provide cutting-edge insights and information on the newest developments.


