AWSIM: End-to-End Digital Twin Simulation Platform

Why is simulation technology crucial for the development of autonomous vehicle technology? This is accepted across the board, as the simulation technology showed great potential in developing autonomous driving software. Let’s quickly overview what values the simulation technology brings to our domain:
A quick overview of the simulation’s value proposal
Simulation is resource-effective. Building physical prototypes for testing and validation can be quite expensive and time-consuming. Using simulation saves both time and money.
Simulation helps identify and address potential safety issues. It would be a great risk to test autonomous vehicles in real-life conditions (especially at the early stages) without simulation first.
Running against scenarios at scale: Thousands of scenarios can be simulated using simulation.
Continuous testing: Simulation can be used for automated testing, greatly improving developer efficiency through data and insights throughout the development lifecycle.
Who uses the simulation technology for autonomous driving?
Frankly, everyone. Because it makes sense; however, what doesn’t make great sense for everyone is that everyone is developing their simulation platform to test and validate their technology. This might work for the deep-pocketed major companies (not even for them because they allocate many scarcely-found human resources for this). Still, it surely doesn’t work for all potential autonomy users.
When there is a need, there’s a solution. This is where the open-source simulation technology falls into place. AWSIM is an open-source end-to-end simulation platform that works with the Autoware project out-of-the-box.
AWSIM’s importance and role
Back in the day, the Autoware project worked with the SVL for autonomous driving simulation. When SVL decided to go into sunset mode (where active development is suspended), the Autoware Simulation working group benchmarked several simulation platforms and decided to use AWSIM for the Bus ODD project because of the strong involvement of TIER IV and Robotec AI.
Of course, Autoware is not closed for other tools; any simulator is correctly integrated with Autoware.Universe should work, and Autoware Community is already involved with many other simulators for Autoware testing.
AWSIM alleviated some practical shortcomings, such as connecting to the cloud infrastructure to control the simulation environment. Additionally, GPU-enhanced sensor models by Robotec.AI are allowing multiple-sensor configuration testing.
Now, let’s look at what AWSIM is like under the hood.
AWSIM: Under the Hood
AWSIM has awesome documentation (https://tier4.github.io/AWSIM/) from which you can learn about Autoware’s simulation platform. The community is heavily engaged in AWSIM, and further development is ongoing. Join the Autoware discord channel (https://discord.com/invite/Q94UsPvReQ) to learn more about Autoware and AWSIM and reach out to the community.
In the next sections, we will explain some key aspects briefly.
Ready to use with Autoware project
All interfaces required to cooperate with Autoware.Universe is available out-of-the-box
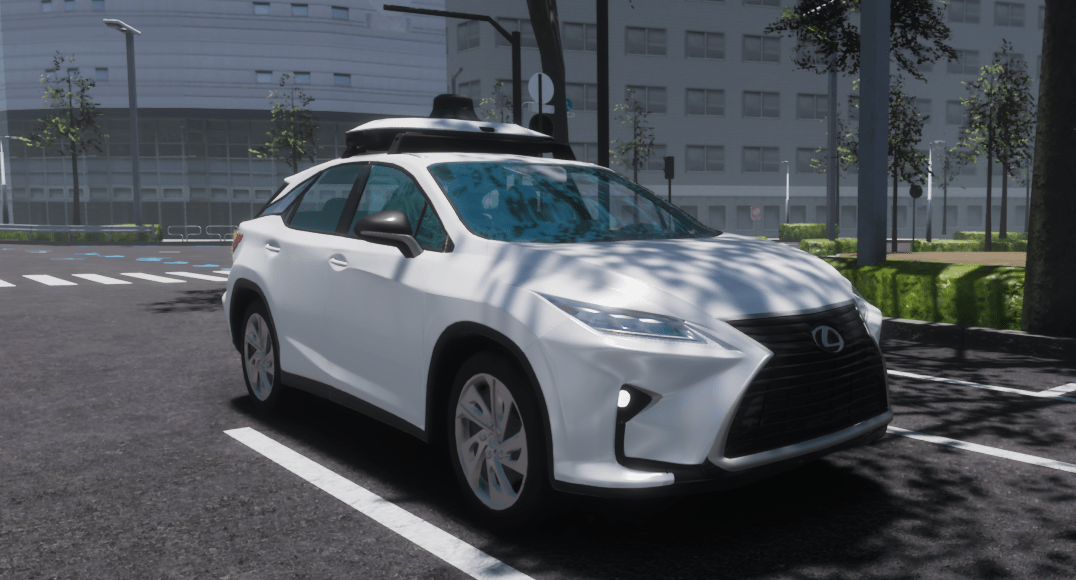
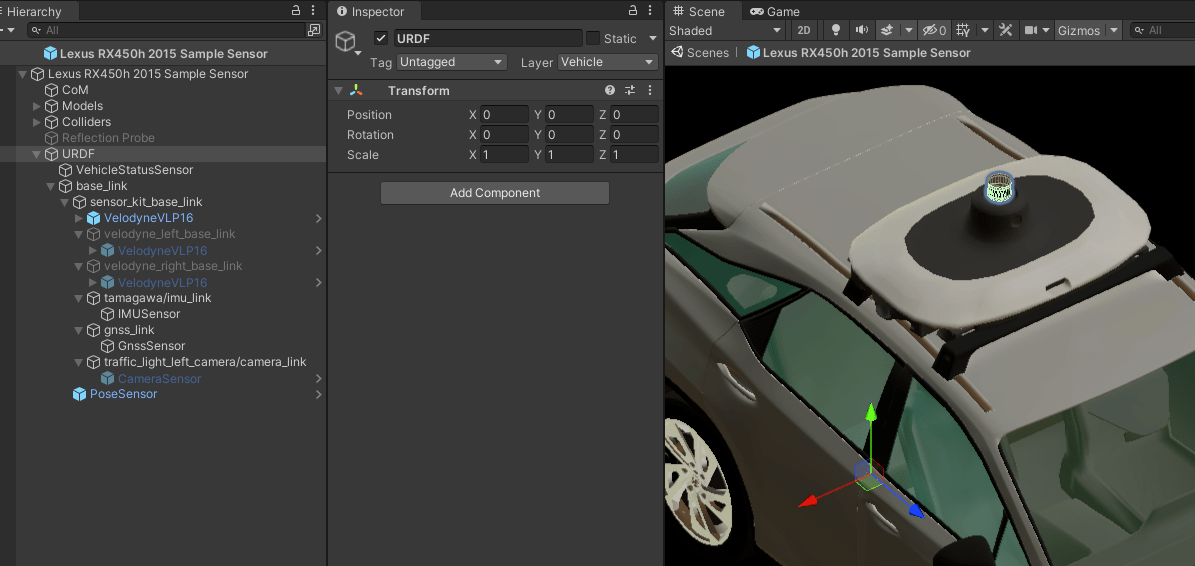
Various ego vehicles with sensor packs
The default prefab ego vehicle was developed using a Lexus RX450h 2015 vehicle model with a pre-configured sample sensor kit.
NPCs (vehicles and pedestrians)
Traffic involves NPC vehicles that are spawned in the simulation. The traffic also involves NPC pedestrians; you can control their movements using scripts.

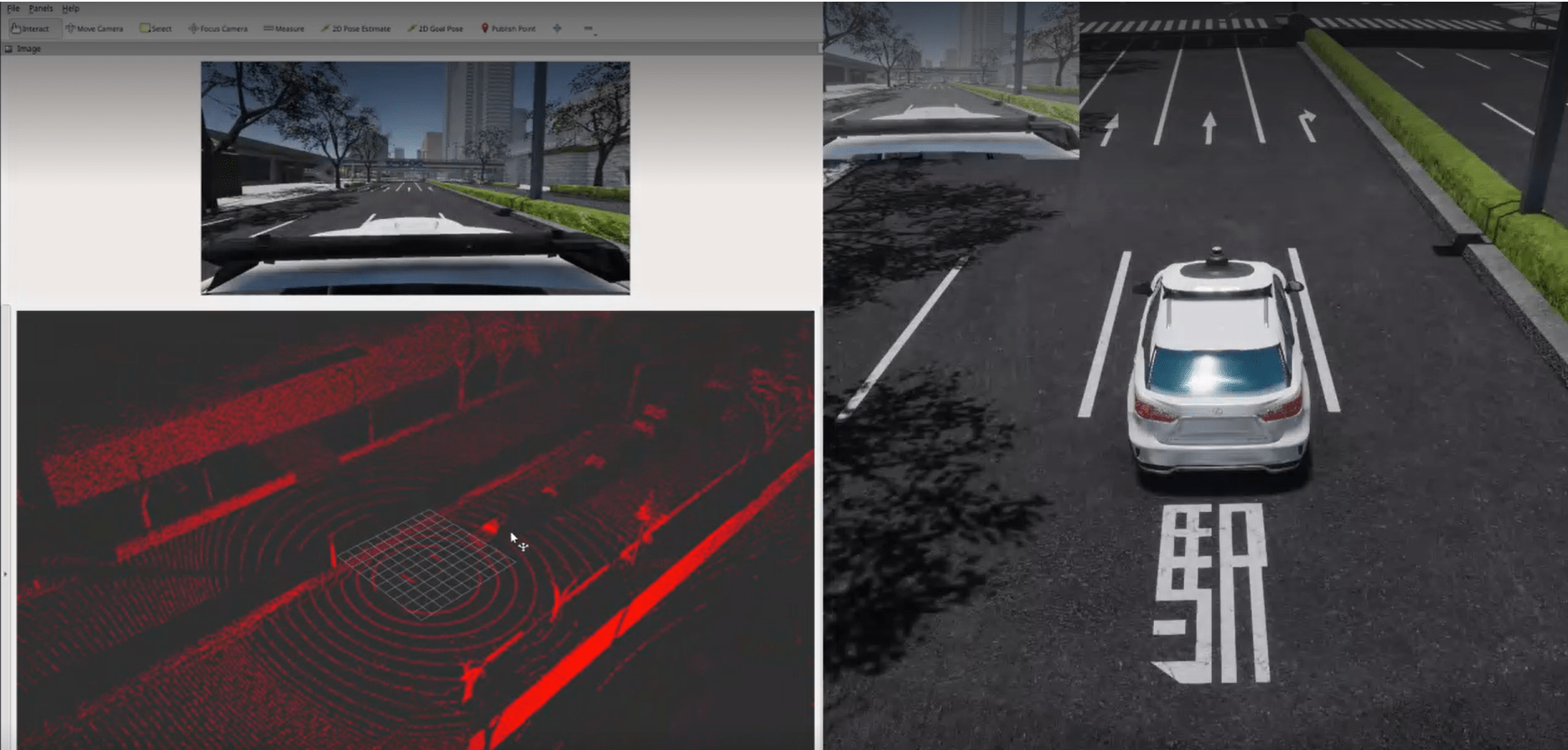
Sensors models are integrated
Many sensor modalities, including LiDAR, camera, IMU sensor, GNSS sensor and vehicle status sensor, are coming out of the box with AWSIM. Mechanical sensors can be simulated using Robotec GPU LiDAR (RGL) – https://tier4.github.io/AWSIM/Components/Sensors/LiDARSensor/RGLUnityPlugin/
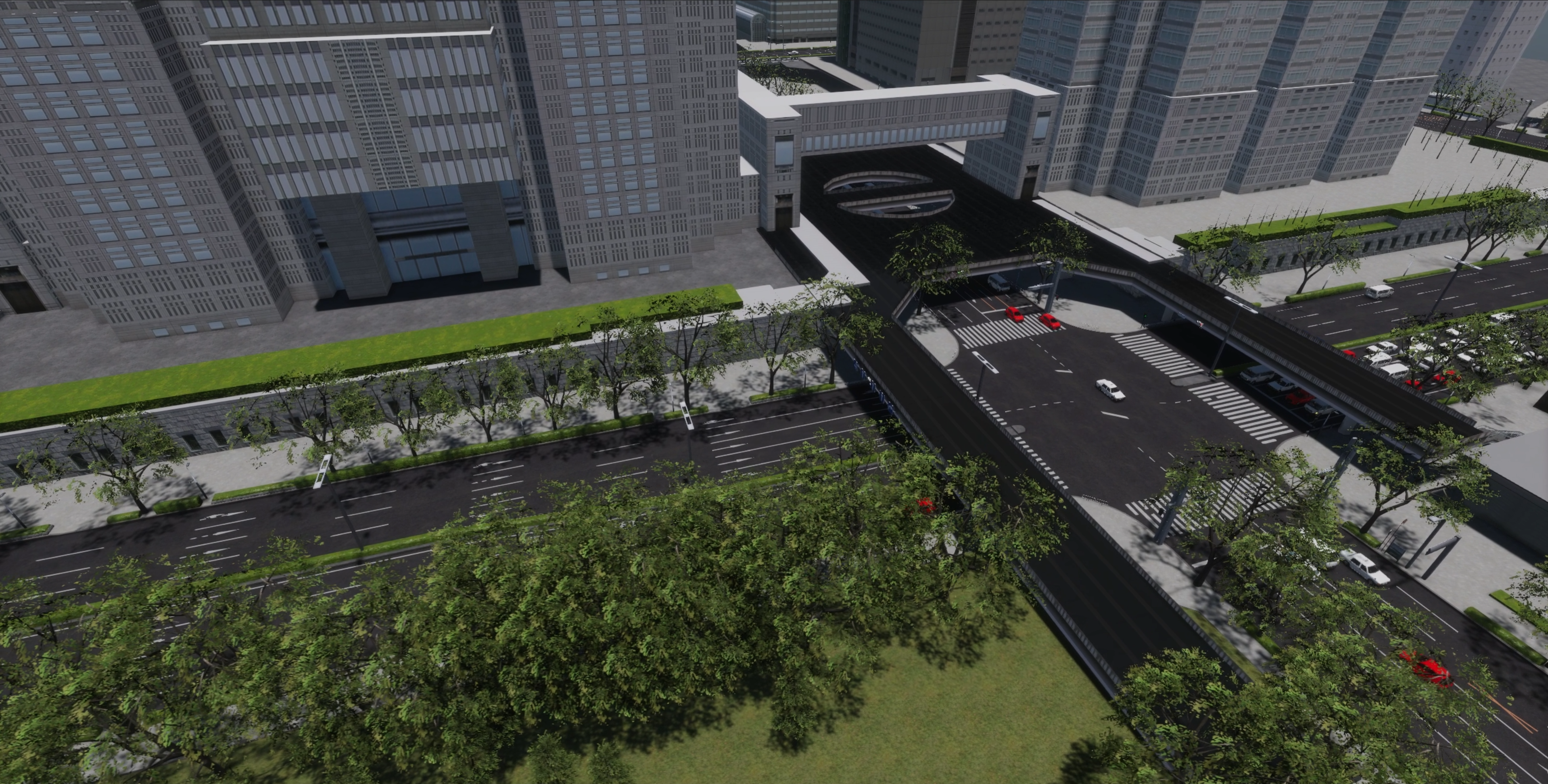
High-definition, photorealistic environments
A digital twin of the Shinjuku Tokyo area is provided with the AWSIM with lanenet2 and point cloud maps. Also, traffic lights are simulated.
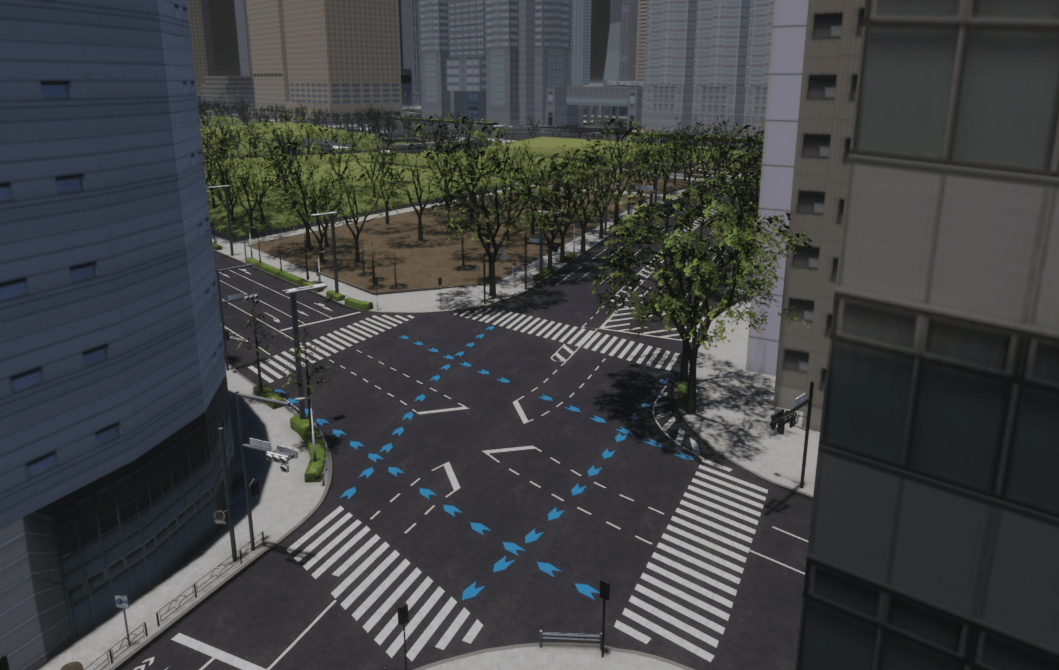
Random and configurable traffic
The traffic moves on the lanenet2 maps while traffic lights and right of way are respected. The traffic environment is fully configurable with randomized seed, NPC count and NPC spawning points.
Some key features of AWSIM
Open source:
Made with Unity Game Engine that provides realistic graphics and ease of use
ROS2 native communication
Using ROS2ForUnity, high performance communication solution to connect Unity3D and ROS2. Higher throughput and lower latency compared to other bridging solutions. And it uses real ROS2 nodes/publishers/subscribers
AWSIM was also used for Bus ODD development
Since AWSIM is an indispensable tool for Autoware development, it’s made to be fully customizable in terms of using the vehicle and vehicle model, importing different environments, and selecting NPCs and traffic elements in the simulation.
During the Bus ODD development work at Autoware project in 2022, the simulation working group created the digital twin of Yıldız Technical University in Istanbul, where the Anadolu Isuzu’s 8-meter electric bus was being tested and deployed for full self-driving trials.
AWSIM is the official Indy Autonomous Challenge (IAC) SIM racing platform

Autoware Foundation partnered with Indy Autonomous Challenge (IAC) and Autonoma Labs to develop the official IAC racing simulation platform integrated into AWSIM.
The inaugural IAC SIM race will be at CES2024! 🚀
Registrations are open 👉 https://www.indyautonomouschallenge.com/simracesevents
The IAC will relaunch its simulation races with the Autoware Foundation to expand the number of university teams developing and training novel AI driving algorithms. The SIM races provide a highly accessible way for teams to participate in the IAC, breaking down barriers to funding or physical car availability. Teams will develop AI drivers to compete with others from around the globe. Additionally, this platform prepares teams to progress to real-world, on-track competitions. Official IAC SIM Races teams are limited to university-affiliated participants.
Autonoma Labs, a start-up founded by former IAC university team members, provides advanced simulation modeling that replicates the real-world IAC racecars integrated into the AWSIM.
In the next post about AWSIM, we will delve into the work that Autonoma Labs has done to integrate Dallara-21 IAC racecars and track assets into the AWSIM. Don’t miss it!


