Autoware Technical Steering Committee – October 2023
Author: ADMIN

Autoware Technical Steering Committee – October 2023
Welcome to the second edition of the TSC Update newsletter!
Here’s a concise summary of what happened last month at the technical working groups of the Autoware Foundation.
Software Working Group
- Folks at the Industrial Technology Research Institute (ITRI)(工業技術研究院, 工研院) have completed their Bus ODD demo shooting in Taiwan, and we will be releasing the second and final edition of the Bus ODD work very soon.
- A great effort in building various GUIs to make the Autoware project more convenient to use has been started by Khalil Selyan – See here -> The Build GUI | The Launch GUI

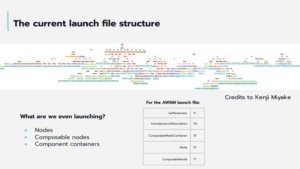
- AWF Software Architect M. Fatih CIRIT prepared a beautiful Launch Unifier Tool to simplify the launch structure of the Autoware Project. Definitely worth taking a look, don’t miss it
Localization & Mapping Working Group (as a sub-working group)
- This month, the work continued on Georeferenced Point Cloud Map Generation, Dynamic Object Removal and Localization Error Metrics.
Localization & Mapping Working Group (as a sub-working group)
- This month, the work continued on Georeferenced Point Cloud Map Generation, Dynamic Object Removal and Localization Error Metrics.
Planning & Control Working Group (as a sub-working group)
- Some improvements are being discussed to the longitudinal controller for hilly road tests.
- Requests are made to support overhanging obstacles during the filtering process.
- Addressing some of the issues that arose from AWSIM tests continued.
Sensing & Perception Working Group (as a sub-working group)
- We started to prepare training codes for perception nodes
- Added RoboSense LiDAR support in universal LiDAR driver
- Implemented dust detection process for LiDAR point clouds using morphological processing.

Operational Design Domain (ODD) Working Group
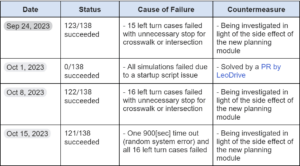
- Since the latest Technical Steering Committee meeting, a total of 552 scenario tests were performed on Autoware CI/CD, and 366 out of 552 tests were passed. A startup script issue caused a total failure (0/138 succeeded) of the weekly test, and it was quickly fixed. Other issues were investigated, which was a side effect of the new planning module.
- The use case list has been brushed up, and some typical scenarios have been prototyped.
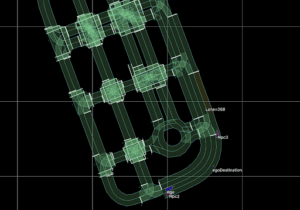
- For the pullover scenarios, the Shalun (Taiwan) map was chosen. The unconnected rightmost lanelets were assigned with the subtype of “road_shoulder” instead of normal “road”.
- Leo Drive proposed to provide the scenarios on a virtual map to enrich the test scenario database. A new “catalog (set of scenarios)” in the CI/CD pipeline is being prepared to accept the new scenarios.
Simulation Working Group
Design of verification procedure for AWSIM and Autoware project:
- The Wiki page is created with a description of the verification procedure
- OpenScenario library to be prepared (ODD WG scenarios can be reused, possibly more to be created)
- Scenario Simulator (SS2) and AWSIM integration will be used to execute scenarios (the feature is ready and to be merged into public AWSIM soon
Racing Working Group
- Two teams (Autoware Aces & Autoware Rocket) used the Autoware project (Po-Jen Wang and Tejas Agarwal) during the 14th F1Tenth Autonomous Grand Prix at IROS 2023 in Detroit. They were both one-man teams, running their own F1Tenth vehicles. Po-Jen used advanced gap follow (no map), and Tejas used pure pursuit on an optimized trajectory (using a map), and standard gap follow. Po-Jen finished in second place, and Tejas finished in third place.

Autoware integration on F1Tenth continues:
- Currently testing the perception packages on Jetson: tensorrt_yolox and bytetrack
- tensorrt_yolox works well with real-time fps
- Currently resolving tracking issues with bytetrack
Open AD Kit Working Group
- Continuing to experience new engagement opportunities and input from prospective members. Colleagues from Red Hat started to join the working group.
- We started working on the CES demo using the Open AD Kit, which will be built on top of the demo we prepared for the Autonomous Vehicle Technology Expo in Stuttgart.
- Great discussions are ongoing for Reducing Autoware container size and optimizing developer and production environments. Check out the in-depth discussion and the progress.
- DevOps Dojos effort is continued -> DevOps Dojo dashboard
- The ROS Node update effort is continued (a call for volunteers is in place) -> ROS Node update status spreadsheet
- The open AD Kit demo at IROS 2023 in Detroit was completed successfully. The PIX Moving chassis was instrumented with the Ampere Altra Developer Platform (AADP) from ADLINK Technology and the CAN adapter from Kvaser AB. The chassis was running on the street autonomously, and a video was captured to be shown alongside the chassis in a static demonstration at the IROS show floor and it was received very well.

- The content created around this demo was among the most liked/commented/reposted content published on Autoware Foundation’s LinkedIn channel.
Reference Design Working Group
- The hardware reference design document was finalized.
- A reference design template was proposed, for example designs for various projects and platforms.
API Working Group
- The V2X interface design proposal was discussed at the working group meeting
- Also, the working group started to populate the Autoware Documentation Design AD API pages.
See you at the next TSC Update in December!
Don’t forget to subscribe to this newsletter and other Autoware Foundation LinkedIn newsletters!
We’re soon starting the Centers of Excellence newsletter as well.
There is just so much going on at the Autoware Foundation. Make sure to like/repost our LinkedIn content and visit our website at autoware.org


