Autonomous Valet Parking 2020

Well, it’s finally over and the 2020 Autonomous Valet Parking (AVP) demo was a massive success! A huge thanks goes out to all of the organizations and individuals who helped contribute to the first fully open-source autonomous vehicle stack and our very first demo.
The Autonomy Software Working Group (ASWG) of the Autoware Foundation kicked off the autonomous valet parking project almost a year ago, on December 10, 2019. Twelve individuals from ten organizations set themselves the goal of having a car park and retrieve itself autonomously using open-source software. This demonstration was preceded by other AVP efforts (for example, https://avp-project.uk/). However, it would be the first to use Autoware.Auto, which is unique among open-source software projects in the emphasis on developing reliable, high-quality, and well-tested implementations of modern algorithms that companies can use as a starting point for production development. Notably, the AVP codebase achieved a remarkable 80% test coverage. This demo would be a chance to test the quality of the technology in a real-world environment. By the end of the project, we counted more than 1,200 source code commits from at least 50 developers and 13 companies.
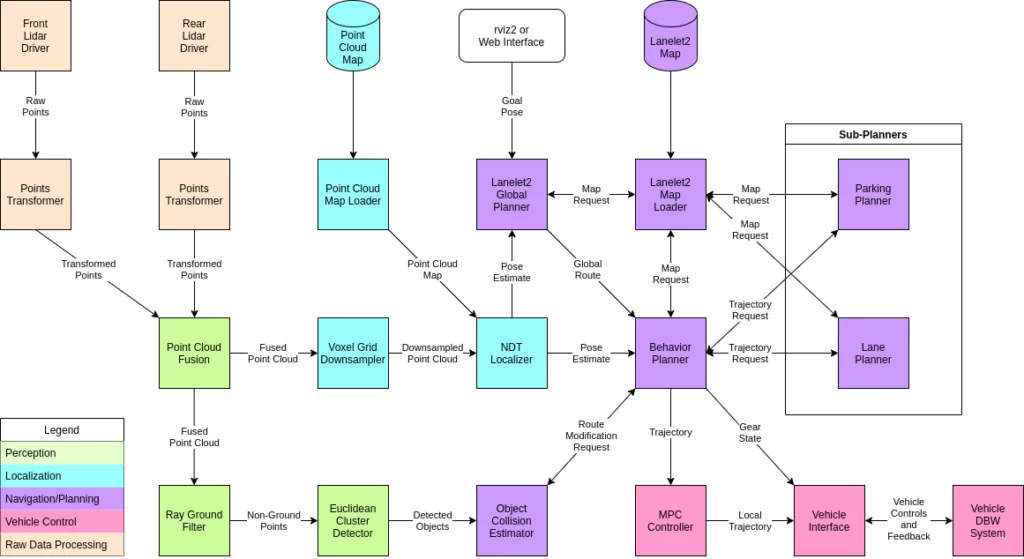
The project was divided into five milestones, with each milestone building upon the previous ones. Key building blocks such as 3D NDT matching needed to be completed in order for the LIDAR based localization to work accurately and reliably enough for navigating in a tight parking spot.
We’ve been keeping a close eye on contributions over the course of the project and you can see how everyone came together just prior to the demo at the beginning of October to pull this off:
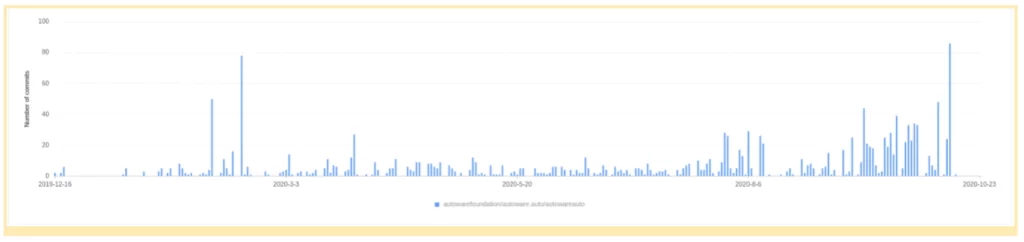
Simulation played a big role in testing, especially because of the COVID-19 situation during a large part of 2020, altering company priorities and making in-car testing difficult. Despite these, software contributions accelerated throughout the year and culminated in the hackathon week preceding the AVP demo. During the last week, several iterations between simulation and in-car testing were performed by contributors in the US, EU, and Japan working around the clock. A simple web-based interface was designed for the park and retrieve functions. Right up to the demo day, it wasn’t clear how much of the original goal would be achieved.
It’s a huge credit to the members involved that all the components came together flawlessly on the final day, showing all the components integrating well together. Due to COVID-19 related restrictions, there was a very small number of participants on-site to witness this milestone for Autoware and for open-source software in general.
So—now that it’s over, what did we learn? Well, we definitely learned that hack-a-thons are a lot harder to organize and time correctly than we originally thought. To that end, we will be planning another in our next development cycle but with more up-front communication to the community, more well-defined goals, and a larger list of relevant tasks for participants to complete. We also learned that the open-source and autonomous vehicle communities certainly know how to come together to hit a deadline! We’ve got a few follow-up items and a lot of good information in the full retrospective from the ASWG meeting just after the demo (minutes here).

And now the big question: Where do we go next? The Technical Steering Committee (TSC) has decided that the next major Operational Design Domain (ODD) that we want to tackle is… :drumroll:… Cargo Delivery! The Operational Design Domain Working Group (ODDWG) is already hard at work fleshing out this ODD with definitions and use-cases. If you want to join their discussion, check out this Discourse post. However, before the ASWG gets chugging on the next ODD, we’ve got a lot of clean-up to do from the rush to finish AVP. If you’ve ever wanted to leave your mark on a major community project but you didn’t want to have to dive into the guts of a huge codebase, now is a perfect time! We have plenty of small, simple changes that need developers so check out our issues list for our clean-up milestone and dive right in! The maintainers and other contributors are always hanging around on the Autoware Developers Slack to lend a hand. Finally, if you want some raw video from the AVP demonstration, head over to our new YouTube channel.
Hope to see you all (virtually) soon!
Josh Whitley
Software Architect
The Autoware Foundation


