Autonomous Cargo Delivery 2021
After about a year since we did a release of Autoware.Auto v1.0.0, which was used for the Autonomous Valet Parking Demo, we have finally accomplished the 2021 Autonomous Cargo Delivery demo. We appreciate all the organizations and individuals who have contributed to the development of Autoware.Auto and shooting of the demo.
The demo video illustrates the sample scenarios we are assuming for the cargo use cases, focusing on some of the new features we have developed this year. The newly developed features include the updates in the perception modules to detect participants in the environment, a new planner to handle intersections, and a controller to realize better path-following accuracy.
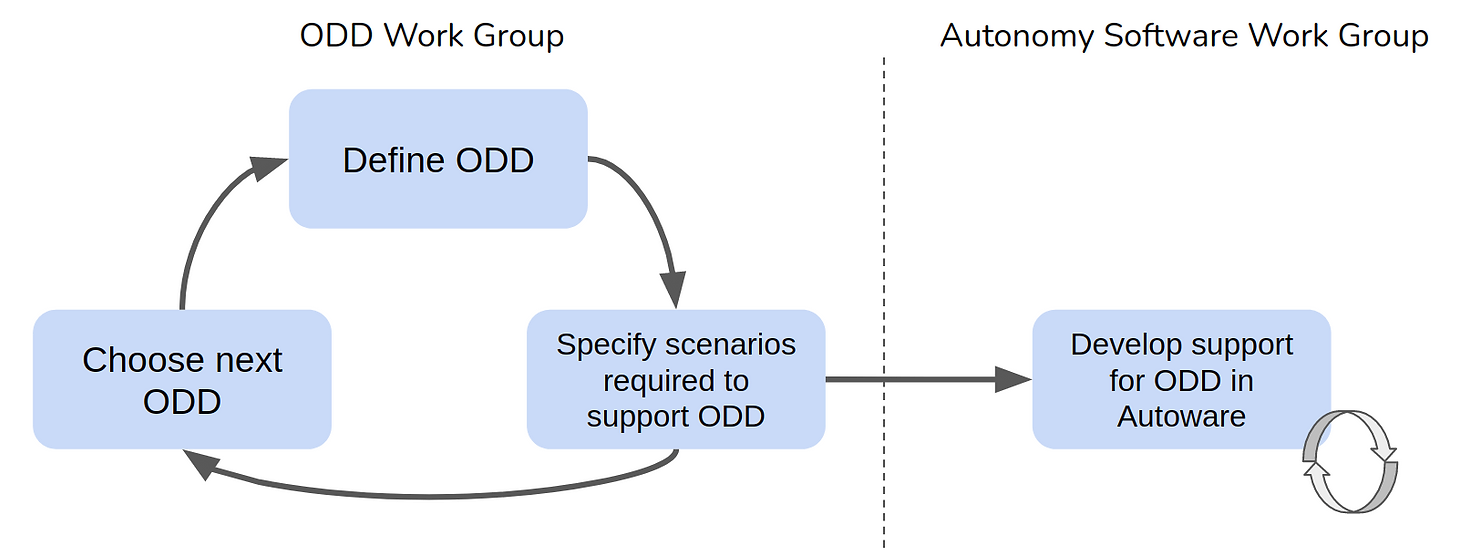
The video also demonstrates the new simulation pipeline used to test various scenarios against our autonomous driving stack. During the Cargo Delivery project, we have introduced the operational-design-domain-driven development process. During the previous AVP project, we learned the importance of setting clear goals for development and decided to form the Operational Design Domain(ODD) Working Group in the TSC in June 2020. The working group first defines the ODD and goal use-cases of the projects as machine-readable scenarios that can be used for simulation tests.
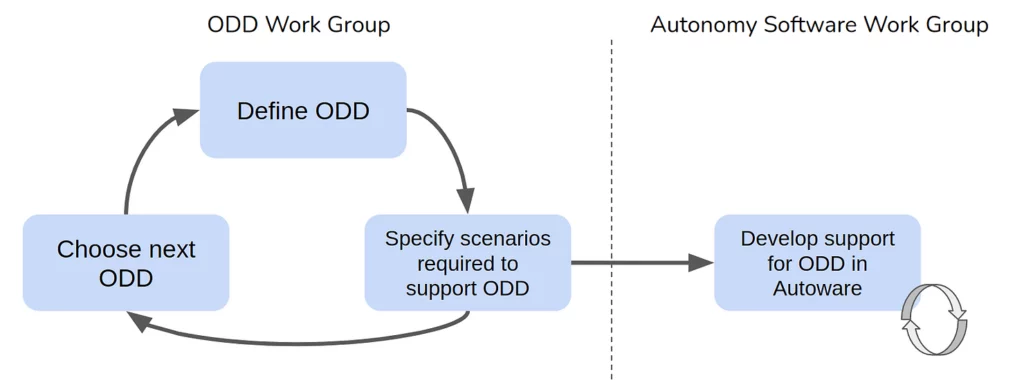
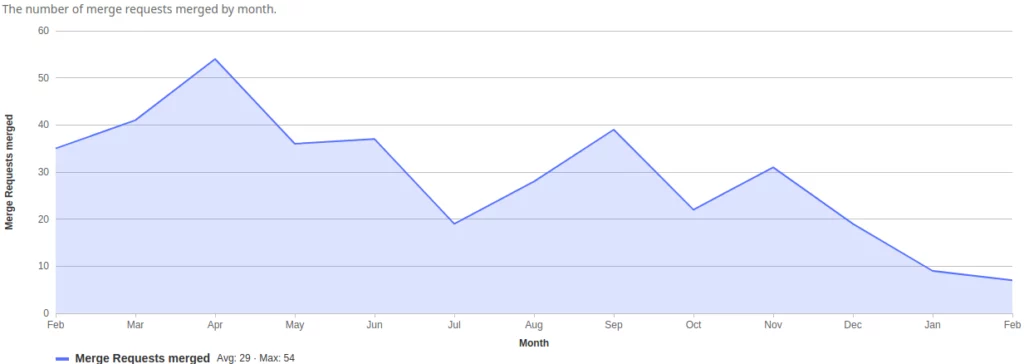
Based on the ODD and required use cases, Autonomy Software Working Group (ASWG) divided the project into milestones. We first started with defining the architecture of the autonomous driving stack, followed by actual feature implementation. To improve communication among the community members, we have created the work breakdown structure and contributors list to track key developers’ expertise for smoother task assignments and collaboration. I would also like to thank many other developers who took over some of the overflowing tasks. As a result, we have had 335 commits from more than 60 contributors since the release of Autoware.Auto v1.0.0 to achieve the cargo delivery demo.
What’s coming next?
Now that the demo is over, we are currently working on the code cleanup and technical debt reduction milestone to have the stable V2.0.0 release of Autoware.Auto. We are also planning to move on to the next development cycle with the target ODD decided by the TSC, Bus on Public Road. We are excited to drive ourselves onto public roads. However, this also means the need for a lot more contributions from the community to achieve the challenging goal. We currently have six different working groups to cover various aspects of the autonomous driving stack, and we are always welcome for anyone to join discussions. Please visit the Autoware website to join the working group calls if you are interested.


