arm-autonomy on Autocore’s PCU bring up
Following the introduction of Autocore’s PCU we have explored how to get the arm-autonomy software stack running on the board.
The arm-autonomy layer provides an hypervisor based solution (currently based on Xen) for autonomous system. It contains recipes and classes to build host and guest systems. Making use of arm-autonomy we can compile guest VMs (domU) that are confined to their own space and are given access to hardware resources by the Xen hypervisor.
To get access to the full blog post please follow this link. In order to get the arm-autonomy stack working we need to get the right sources, build the guest image, the host image and prepare the SD card for the PCU.
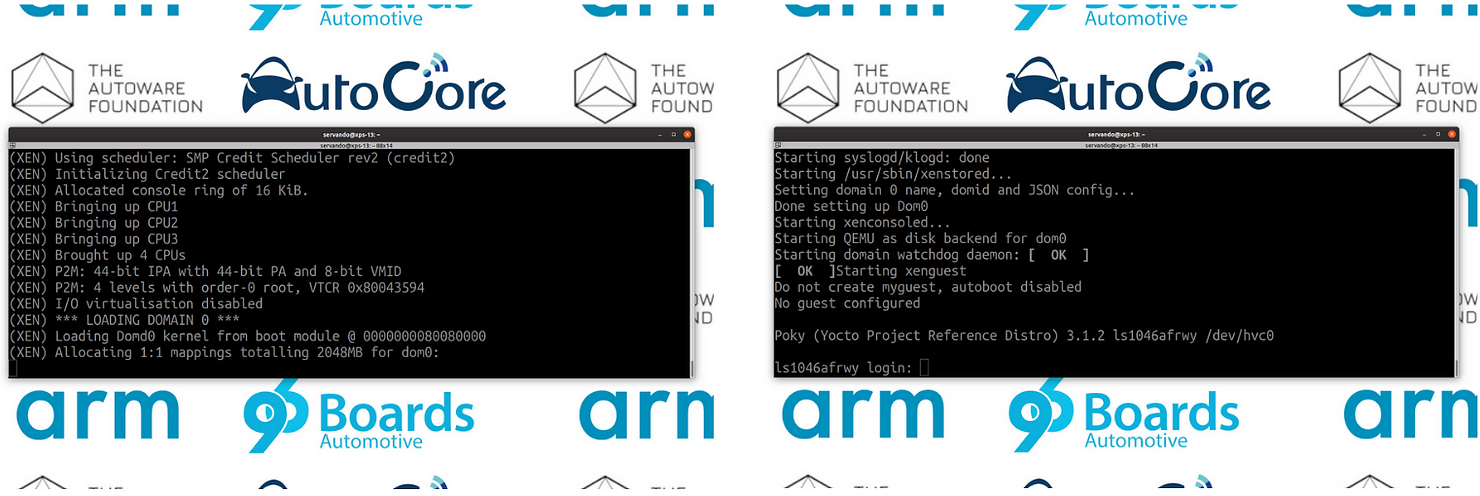
As shown in the image below, following the setup we can boot the PC where we will see first Xen booting, which in turn boots the dom0 running linux.
We can log into the dom0 using the default root user and boot the domU as:
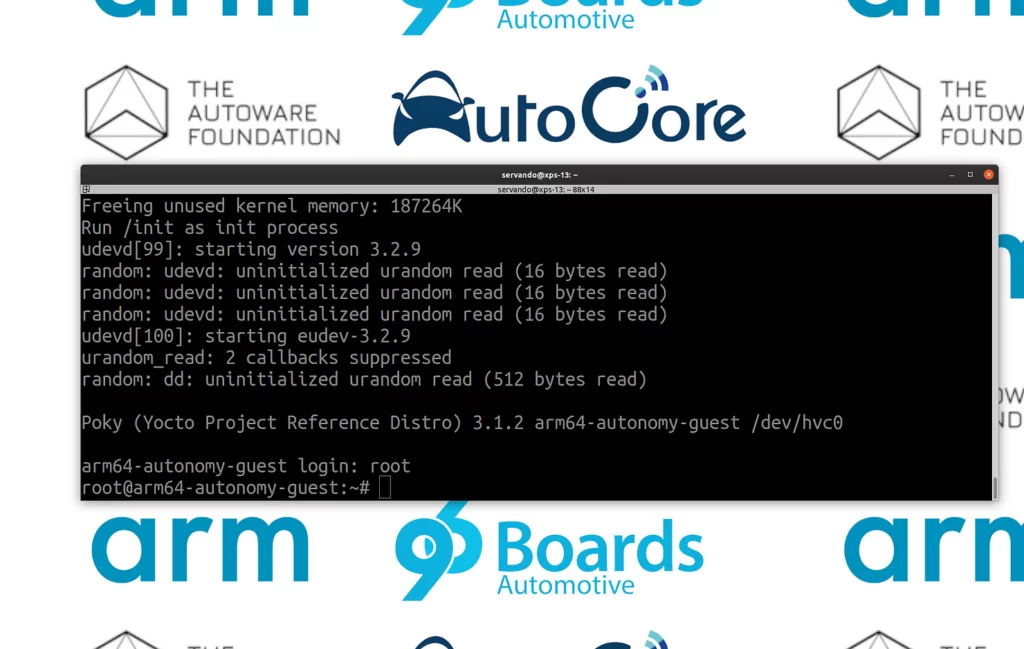
$ xenguest-manager create /usr/share/guests/myguest.xenguest myguest $ xenguest-manager start myguest $ xl console myguest
which boots into the arm64-autonomy-guest as can be seen below.
Please check the video demo below.
In next iterations we will look at deploying ROS2 into the guest VM in the next blog, this way we will have all the components that we need to integrate Autoware.Auto to run in a guest VM handled by the Xen hypervisor.


